移動機器人AGV/AMR 各種充電(diàn)方式
AGV/AMR的充電(diàn)方式正在不斷革新(xīn),成為(wèi)AGV/AMR長(cháng)時間續航工(gōng)作(zuò)的關鍵,也成為(wèi)AGV/AMR 高效率作(zuò)業的關鍵。
§
充電(diàn)時間分(fēn)類 : 随時充電(diàn) / 全周期充電(diàn)
§
随時充電(diàn)是在 AGV的各停車(chē)地點無時間限制地随時充電(diàn)。如果有(yǒu)較多(duō)的充電(diàn)點,保證AGV在工(gōng)作(zuò)過程中(zhōng)損耗的電(diàn)能(néng)得到及時的補充,實現對蓄電(diàn)池的淺充淺放,極大延長(cháng)了蓄電(diàn)池的使用(yòng)壽命,同時可(kě)以降低機器人自身的蓄電(diàn)池的容量,從而降低電(diàn)池成本。
全周期充電(diàn)要求AGV暫停工(gōng)作(zuò)狀态并進入指定的充電(diàn)區(qū),當蓄電(diàn)池電(diàn)量降至指定範圍内方可(kě)進行充電(diàn)。
移動機器人可(kě)同時采用(yòng)上述兩種充電(diàn)方式相結合,大大提升了工(gōng)作(zuò)效率從而降低了成本。

§
充電(diàn)區(qū)域分(fēn)類 : 在線(xiàn)充電(diàn) / 離線(xiàn)充電(diàn)
§
在線(xiàn)充電(diàn)是AGV不需要到達指定區(qū)域進行充電(diàn)。而是利用(yòng)工(gōng)作(zuò)過程中(zhōng)短暫的停留碎片化時間進行充電(diàn)。不占用(yòng)工(gōng)作(zuò)時間的充電(diàn)方式,把充電(diàn)站點嵌入到AGV的工(gōng)作(zuò)流程中(zhōng),更進一步提升AGV的工(gōng)作(zuò)效率。
離線(xiàn)充電(diàn)是AGV暫停工(gōng)作(zuò)狀态駛入充電(diàn)區(qū)域進行充電(diàn)。在物(wù)流運輸工(gōng)作(zuò)量并不大的環境下,這類方法使用(yòng)的尤其多(duō)。

操作(zuò)方法分(fēn)類:手動 / 換電(diàn)池 / 自動充電(diàn)

當 AGV電(diàn)量不足時,由控制中(zhōng)心調度到達指定充電(diàn)區(qū)域,由專職人員手動完成充電(diàn)。充電(diàn)完成後人工(gōng)拔掉充電(diàn)器。手動充電(diàn)AGV 的特點是安(ān)全可(kě)靠,簡單易行,設備成本較低。常用(yòng)于自動化程度要求不高,車(chē)少人多(duō)的标準工(gōng)作(zuò)場合。同時該車(chē)輛需要配備較大容量的電(diàn)池為(wèi)保證 AGV的續航能(néng)力。

更換電(diàn)池充電(diàn)即當 AGV電(diàn)量不足時,車(chē)輛移動至指定區(qū)域人工(gōng)或機械臂更換電(diàn)池組,AGV可(kě)以快速恢複到工(gōng)作(zuò)中(zhōng)。換下的電(diàn)池組通過充電(diàn)後等待下一次更換。特點是簡單快捷,可(kě)實現 AGV全天 24小(xiǎo)時連續工(gōng)作(zuò),需多(duō)備一組電(diàn)池,從而減少車(chē)輛的投放數量,提高車(chē)輛工(gōng)作(zuò)時長(cháng)。
![]()
以海康威視推出的 AGV 快換裝(zhuāng)置為(wèi)例,自動換電(diàn)站采用(yòng)模塊化設計,由換電(diàn)倉及電(diàn)池倉兩部分(fēn)組成,可(kě)快速完成移動機器人電(diàn)池的自動更換,全程無需人工(gōng)幹預,相比原先機器人充電(diàn)需要 1.5h,自動換電(diàn)隻需 2min。更值得一提的是,換電(diàn)過程中(zhōng),機器人不斷電(diàn),可(kě)保持與上層系統正常通信。換電(diàn)完成後即回歸工(gōng)作(zuò)崗位,業務(wù)無需間斷。
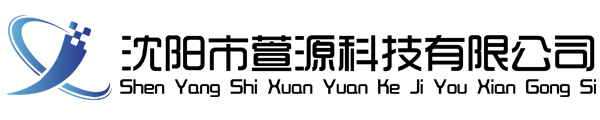
自動充電(diàn)即當AGV需要補充電(diàn)時,會自動報告并請求充電(diàn),按指令行駛到充電(diàn)區(qū)域,車(chē)載充電(diàn)連接器與地面充電(diàn)系統自動連接并實施充電(diàn)。充電(diàn)完成後AGV小(xiǎo)車(chē)自動脫離充電(diàn)系統,駛向工(gōng)作(zuò)區(qū)或待命區(qū)投入正常運行。
在線(xiàn)自動充電(diàn)目前有(yǒu)兩種,一類是側邊電(diàn)池充電(diàn),另一類是充電(diàn)電(diàn)極朝下地面電(diàn)池充電(diàn)。
§
充電(diàn)器連接分(fēn)類:接觸式充電(diàn) / 無線(xiàn)充電(diàn)
§
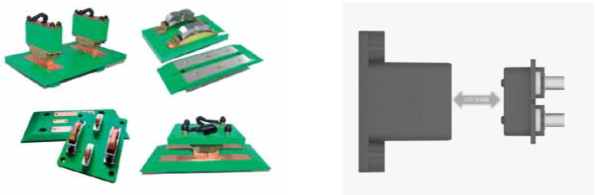
接觸式充電(diàn)即所有(yǒu)充電(diàn)回路需要用(yòng)電(diàn)纜和充電(diàn)觸頭将車(chē)輛與供電(diàn)系統連接,以便可(kě)以直接對其進行充電(diàn)。接觸式充電(diàn)可(kě)提供較大的充電(diàn)電(diàn)流,以實現快速充電(diàn)。目前是離線(xiàn)充電(diàn)的首選方式。但其不适用(yòng)于頻繁的随時充電(diàn),存在充電(diàn)觸頭磨損,需要定期更換。并可(kě)能(néng)在充電(diàn)過程中(zhōng)産(chǎn)生火花(huā),存在安(ān)全隐患。因為(wèi)充電(diàn)觸頭系暴露部件,無法在低溫凝露、潮濕、易燃易爆等環境下正常工(gōng)作(zuò)。
無線(xiàn)充電(diàn)是非接觸充電(diàn)裝(zhuāng)置,不需要用(yòng)電(diàn)纜将車(chē)輛與供電(diàn)系統連接,充電(diàn)無金屬外露同時無需接觸,更加安(ān)全,适用(yòng)性更廣。現階無線(xiàn)充電(diàn)因成本較高,目前在整個行業應用(yòng)很(hěn)少。
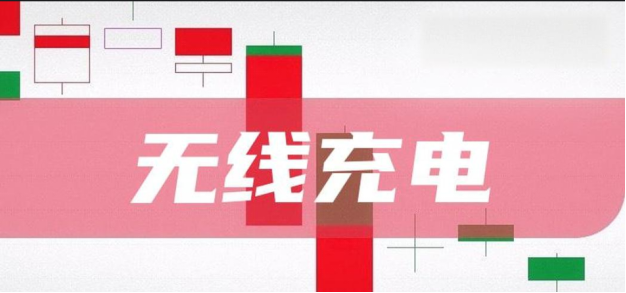
無線(xiàn)充電(diàn)分(fēn)為(wèi)電(diàn)磁感應充電(diàn)、磁共振充電(diàn)、無線(xiàn)電(diàn)波充電(diàn)。

§
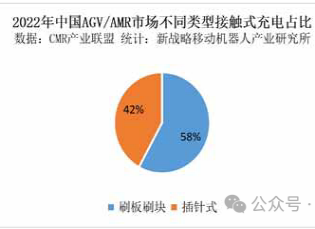
充電(diàn)機類型市場規模占比
§
整體(tǐ)來看,AGV/AMR 充電(diàn)技(jì )術正處在不斷創新(xīn)的階段,緻力于AGV/AMR 充電(diàn)技(jì )術的企業也迎來百花(huā)齊放的時期。新(xīn)充電(diàn)方式的出現也并不意味着傳統充電(diàn)方式要被淘汰,各種充電(diàn)方式适配的 AGV/AMR和應用(yòng)場景各不相同,AGV 充電(diàn)解決方案商(shāng)們通過不同選型的産(chǎn)品為(wèi)廠商(shāng)提供最佳充電(diàn)方式,AGV/AMR廠商(shāng)則通過後台調度系統根據需要充電(diàn)的數量選擇充電(diàn)方式,當需要充電(diàn)的 AGV/AMR 數量大于設定值時,采用(yòng)優先級的調度方式。
當前,移動機器人行業采用(yòng)的充電(diàn)方式以自動充電(diàn)為(wèi)主,充電(diàn)裝(zhuāng)置以傳導式充電(diàn)裝(zhuāng)置為(wèi)主,其市場占比超過 90%。

傳導式充電(diàn)也稱接觸式充電(diàn),所有(yǒu)的充電(diàn)電(diàn)路都是需要通過電(diàn)纜以及充電(diàn)觸點的連接來将車(chē)輛連接到電(diàn)源系統,這樣便可(kě)直接充電(diàn)。接觸式充電(diàn)也分(fēn)為(wèi)兩種,一種是傳統的刷闆刷塊式,另一種是插針式,前者多(duō)應用(yòng)于重載和叉車(chē)型AGV,而插針形式多(duō)見于Kiva類倉儲AGV。此前,刷闆刷塊式是市場主流的技(jì )術方式,但目前插針式充電(diàn)技(jì )術應用(yòng)已越來越廣泛,大有(yǒu)趕超之勢。根據CMR産(chǎn)業聯盟數據,新(xīn)戰略移動機器人産(chǎn)業研究所統計,2022年中(zhōng)國(guó)市場,刷闆刷塊式應用(yòng)比例約為(wèi)58%,插針式應用(yòng)比例約為(wèi) 42%。
在産(chǎn)品價格方面,不同類型的 AGV/AMR 對充電(diàn)機要求不同,因此價格區(qū)間也較大;交貨周期方面,根據新(xīn)戰略移動機器人産(chǎn)業研究所調研統計,行業的平均交貨周期在2-4周左右。
随着工(gōng)業制造自動化和智能(néng)化,AGV/AMR在提升生産(chǎn)效率方面扮演着越來越重要的角色,但AGV運行的基本要求始終未變:安(ān)全性、穩定性和準确性,其中(zhōng)安(ān)全性中(zhōng)就包含着充電(diàn)安(ān)全。無論哪種形高效持久的充電(diàn)方案一直為(wèi)行業所關注,也是未來企業需要重點突破的方向。
§
未來,充電(diàn)技(jì )術将朝着以下三個方向發展。
§
充電(diàn)接口、充電(diàn)部件等标準化:充電(diàn)裝(zhuāng)置的主要部件采用(yòng)模塊化設計,通過簡單的方式能(néng)夠實現擴容的需求,也能(néng)大大縮短維護和保養的時間。充電(diàn)連接器要在更小(xiǎo)尺寸中(zhōng)傳輸更大的電(diàn)流,同時确保連接安(ān)全可(kě)靠。充電(diàn)裝(zhuāng)置能(néng)夠一台主機與多(duō)個對接裝(zhuāng)置連接,實現對多(duō)台移動機器人同時充電(diàn),組合靈活方便,對場地和空間的利用(yòng)更加高效。
快充技(jì )術發展:更短充電(diàn)時間,更大的充放比成為(wèi)移動機器人需求重點,充電(diàn)裝(zhuāng)置的核心-充電(diàn)模塊在輸出穩定性、保護功能(néng)、轉換效率等方面具(jù)有(yǒu)更高的要求,充電(diàn)模塊采用(yòng)冗餘方式,滿足更大容量電(diàn)池的快充需要。
多(duō)維度安(ān)全互聯、數據互通:雲端智慧功能(néng)及展望:随着5G通訊的發展和覆蓋,通過開發高效、可(kě)靠、準确的雲平台,對于安(ān)全有(yǒu)效的電(diàn)池管理(lǐ)和控制非常重要;可(kě)以将多(duō)方的數據進行互通和共享,包括移動機器人本體(tǐ)、充電(diàn)站、管理(lǐ)終端等進行安(ān)全互聯。在雲平台的幫助下,細胞監測功能(néng)可(kě)以得到顯著提升。雲功能(néng)應包括但不限于電(diàn)池監測、SOC和 SOH估計以及故障預測。基于雲的解決方案将提供無限量的數據存儲。此外還有(yǒu)一些目前離線(xiàn)無法實現的潛在功能(néng),如數據采集、電(diàn)池壽
